Our work "Event-Grounding Graph: Unified Spatio-Temporal Scene Graph from Robotic Observations" has been accepted to RA-L
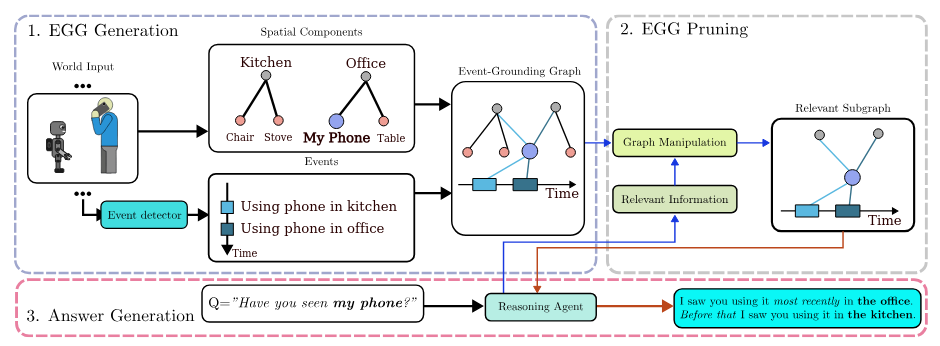
Our work: “Event-Grounding Graph: Unified Spatio-Temporal Scene Graph from Robotic Observations” [1] has been accepted to RA-L.
Our work: “Event-Grounding Graph: Unified Spatio-Temporal Scene Graph from Robotic Observations” [1] has been accepted to RA-L.